Industrial robots are rapidly shifting from strong and repeatable to small, dexterous, and intelligent.That evolution hinges on a new manufacturing solution able to build multi-scale, multi-material, highly intricate parts that conventional methods struggle to produce. High-Precision 3D printing, especially BMF’s projection micro-stereolithography (PµSL), enables sub-10-micron features, smooth internal channels, tendon-like guides, compliant mechanisms, and compact, application-specific end effectors.
Recent case studies illustrate the leap from structural imitation to functional performance, and they map directly to industrial use cases in assembly, inspection, packaging, and human-robot collaboration.
Why BMF’s High-Precision 3D printing?
Traditional machining, molding, and sheet processes excel at macro-scale repeatability but face systemic constraints at the millimeter-to-micron scale.
BMF’s high-precision 3D printing technology is uniquely suited for the research and manufacturing of industrial robots because it bridges the gap between micron-level precision and production-ready durability. With feature resolution down to 2 µm, it enables the creation of complex geometries such as dense perforations, ultra-thin wall conduits, and precise tendon or cable routing—design elements essential for compact, dexterous, and application-specific robotic components.
BMF’s platform allows rapid iteration, customization, and short-run manufacturing without tooling, this capability empowers robotic engineers to push beyond conventional design limits, delivering smarter, more efficient, and more agile robotic systems for modern industrial environments.

Three application patterns already redefining robot capability
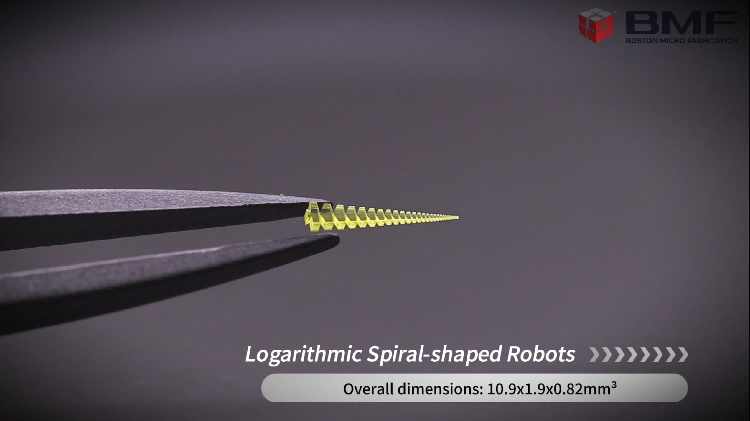
1) Logarithmic spiral-shaped robots
A research team abstracted the continuum motion seen in elephant trunks and octopus arms into logarithmic spiral structures, then produced a family of spiral soft robots spanning centimeter-to-meter scales. A micro-scale variant—just ~1 cm long with 0.14 mm segment edges—was fabricated by BMF’s microArch® S130 (resolution: 2μm) using a tough photopolymer, and driven with 20 µm cables to achieve precise grasping (even handling without damage). For industry, that translates into compact, gentle, contamination-aware grippers for electronics, MEMS, watchmaking, food handling, and lab automation—where part variability is high and damage tolerance is near zero.
https://doi.org/10.1016/j.device.2024.100646
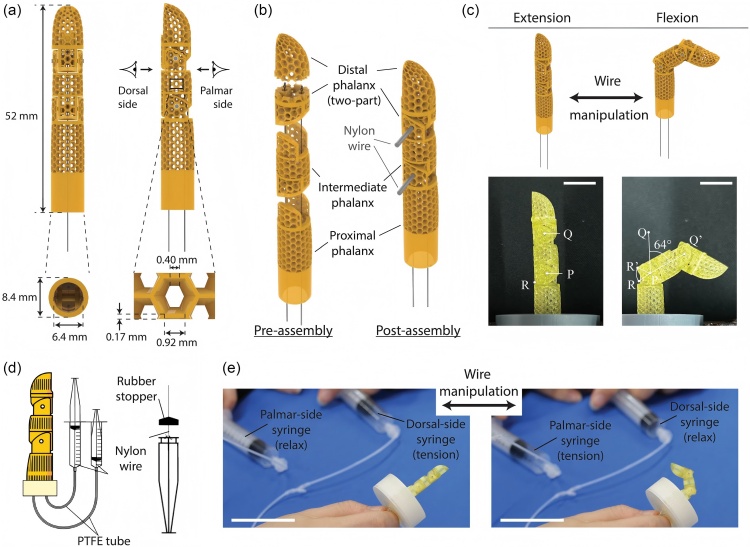
2) Skin-Covered Biohybrid Robotic Finger
A research team from the University of Tokyo has proposed a dual-layer permeable subcutaneous support system composed of a porous skeletal layer and a sponge-like permeable hydrogel layer made of polyvinyl alcohol (PVA). The skeletal layer, fabricated via 3D printing, is designed with dense perforations that maintain the structural strength required for joint motion while allowing fluid flow. The sponge-like PVA hydrogel layer facilitates nutrient permeation and provides mechanical cushioning beneath the dermis. Experimental results show that this hydrogel effectively retains moisture and allows nutrient molecule diffusion, successfully preventing dehydration of cultured skin tissue.
The team designed the robotic skeleton with a hollow structure featuring either stripped slits or numerous hexagonally arranged honeycomb perforations. The structure was fabricated by BMF’s microArch® S140 system (resolution: 10 μm) and printed with HTL photopolymer resin, which offers a tensile strength of 71.5 MPa. This higher tensile strength compensates for the loss of structural integrity caused by dense perforations, ensuring the effectiveness of cable-driven joint movements without any structural damage.
This approach offers an effective solution to enhance the operational durability of skin-covered robots, demonstrating strong potential for applications in dynamic real-world scenarios.
https://doi.org/10.1002/aisy.202400871
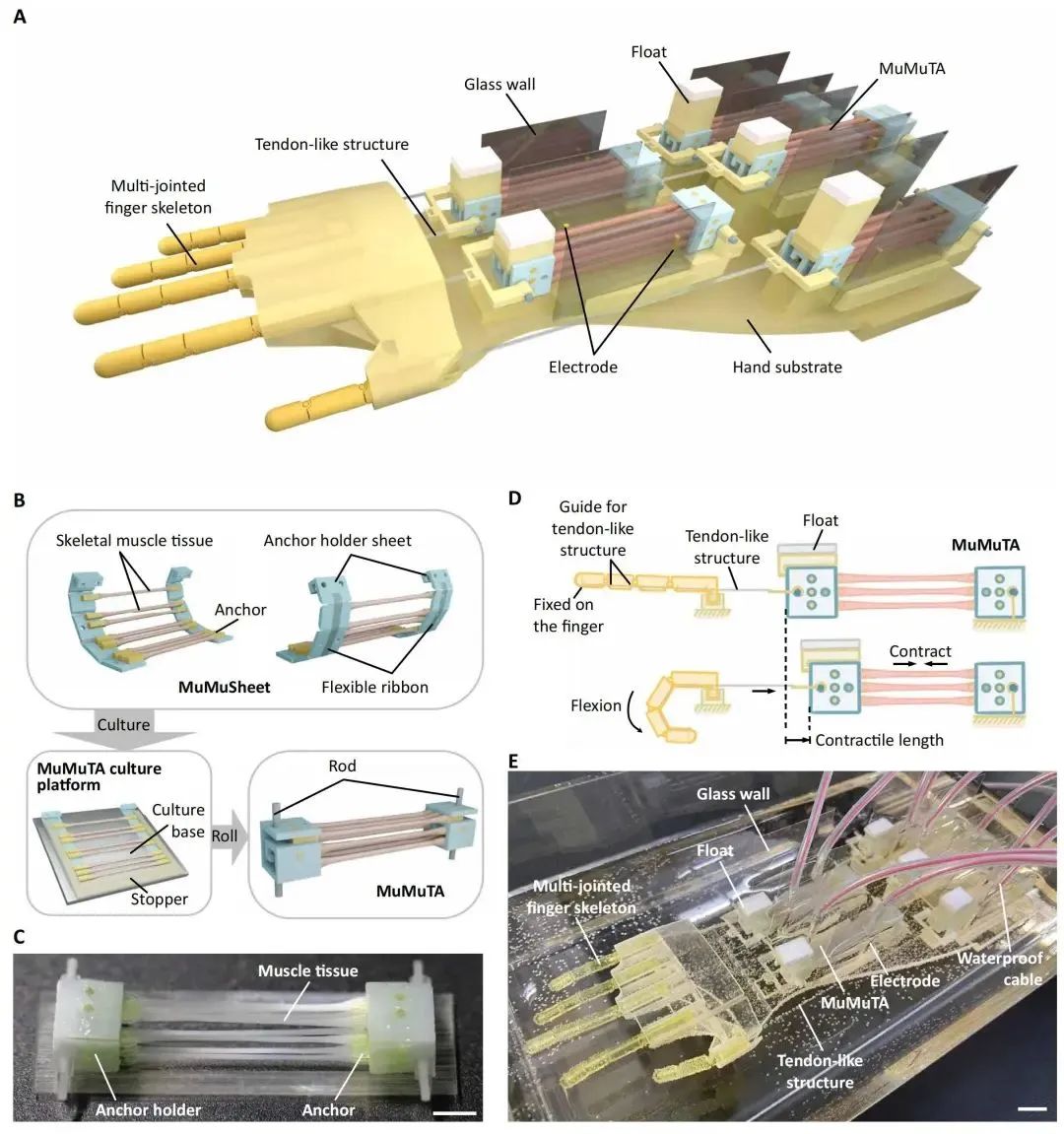
3) Biohybrid hand
Another research team from the University of Tokyo has developed a biohybrid robotic hand driven by multiple muscle tissue actuators (MuMuTAs), achieving large-scale, multi-degree-of-freedom bionic motion. By optimizing muscle tissue alignment and electrical stimulation parameters, the system outperforms existing methods in contraction force, motion control precision, and durability.
Inspired by the structure of a “sushi roll,” the team created an 18 cm-long biohybrid hand featuring a cylindrical core formed by curling eight parallel muscle sheets (50 μm in diameter, 10 cm in length). Five multi-jointed bionic fingers, each powered by an independently controlled MuMuTA, are integrated onto this base. The design ensures sufficient oxygen and nutrient supply to each muscle while maintaining over 95% fiber alignment, boosting single-actuator contraction force to 8 mN and displacement to 4 mm—an improvement of 400% compared to conventional designs.
Using BMF’s high-precision 3D printing system, microArch® S140 (10 μm resolution), to fabricate a multi-jointed hollow finger skeleton and cell culture anchoring structures. The tendon-like guide rails on the inner walls, printed with 10 μm precision, provide accurate physical pathways for cell growth.
https://doi.org/10.1126/scirobotics.adr5512
Conclusion
High-precision 3D printing is no longer just a prototyping tool—it is becoming a cornerstone manufacturing method for advanced industrial robotics. Its ability to deliver micron-level precision, integrate multiple functions into a single part, and accelerate iteration cycles enables robotics engineers to break through design and manufacturing constraints.
BMF’s PμSL technology, proven in demanding research and industry environments, is ready to empower the next generation of robotic systems—making them smaller, smarter, and more capable than ever before.
If you would like to learn more, please contact us. We look forward to exploring opportunities to collaborate with you in advancing the future of microfabrication in industrial robotics.
